I. GIỚI THIỆU
Vi điều khiển PIC họ 16F877A có 2 bộ PWM dùng để điều khiển tốc độ động cơ DC.
Phần này sẽ khảo sát chi tiết khối PWM của PIC và tập lệnh lập trình C cho PWM.
II. KHẢO SÁT PWM
Vi điều khiển PIC họ 16F877A có 2 bộ PWM dùng để điều khiển tốc độ động cơ DC.
Phần này sẽ khảo sát chi tiết khối PWM của PIC và tập lệnh lập trình C cho PWM.
II. KHẢO SÁT PWM
1. SƠ ĐỒ KHỐI PWM của PIC16F877A có sơ đồ khối như hình 7-1:

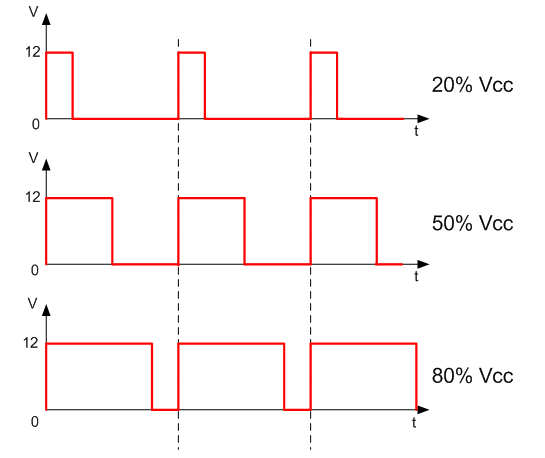
Dạng sóng điều chế PWM như hình 7-2:
2. TÍNH CHU KỲ XUNG PWM
Chu kỳ PWM của PIC16F877A được tính theo công thức:
PVTMR2 (prescale value) giá trị chia trước của timer2.
Khi giá trị của timer 2 (TMR2) bằng giá trị của thanh ghi PR2 thì 3 sự kiện theo sau sẽ xảy ra:
Giá trị của hệ số chu kỳ là 10 bit nên có thể thay đổi từ 0 đến 1023 tạo ra 1024 cấp giá trị điều khiển. Giá trị 10 bit thì 8 bit có trọng số lớn lưu trong thanh ghi CCPRxL và 2 bit còn lại có trọng số thấp thì ở CCPxCON<5:4>.
Hệ số chu kỳ của PIC16F877A được tính theo công thức:
Chu kỳ PWM của PIC16F877A được tính theo công thức:
PERIODPWM = [(PR2) +1] * 4 * TOSC * PVTMR2
Trong đó: TOSC là chu kỳ của tụ thạch anh tạo dao động.PVTMR2 (prescale value) giá trị chia trước của timer2.
Khi giá trị của timer 2 (TMR2) bằng giá trị của thanh ghi PR2 thì 3 sự kiện theo sau sẽ xảy ra:
- Thanh ghi TMR2 bị xóa
- Tín hiệu ngõ ra CCPx lên mức 1, ngoại trừ hệ số chu kỳ bằng 0% thì CCPx vẫn ở mức 0.
- Hệ số chu kỳ PWM được chuyển từ thanh ghi CCPRxL sang thanh ghi CCPRxH. 3. TÍNH HỆ SỐ CHU KỲ XUNG PWM
Giá trị của hệ số chu kỳ là 10 bit nên có thể thay đổi từ 0 đến 1023 tạo ra 1024 cấp giá trị điều khiển. Giá trị 10 bit thì 8 bit có trọng số lớn lưu trong thanh ghi CCPRxL và 2 bit còn lại có trọng số thấp thì ở CCPxCON<5:4>.
Hệ số chu kỳ của PIC16F877A được tính theo công thức:
DUTY_ CYCLEPWM = (CCPRxL : CCPxCON < 5 : 4 >) * TOSC * PVTMR2

- Đây là ảnh mô phỏng protues.

- Đây là code chương trình.
#include <16f877a.h>
#device ADC=10
#fuses XT,NOWDT,NOPROTECT,NOBROWNOUT,NOLVP,NOPUT,NOWRT,NODEBUG,NOCPD
#use delay(clock=4000000)
#define use_portd_lcd TRUE
#include <lcd.c>
unsigned long int pot_data=0;
unsigned long int pwm_data=0;
void main()
{
setup_psp(psp_disabled);
setup_ccp1(ccp_pwm);
setup_ccp2(ccp_off);
setup_timer_1(t1_disabled);
setup_timer_2(t2_div_by_1,170,1);
setup_adc_ports(AN0_AN1_AN3);
setup_adc(adc_clock_internal);
lcd_init();
printf(lcd_putc,"\f DEMO PWM\nBY LAM 3 NGON");
delay_ms(2000);
do
{
set_adc_channel(0);
delay_us(20);
pot_data=read_adc();
pwm_data=pot_data/6;
set_pwm1_duty(pwm_data);
printf(lcd_putc,"\fValue ADC.= %lu\nValue PWM= %lu",pot_data,pwm_data);
delay_ms(1000);
}
while(1);
}
EmoticonEmoticon